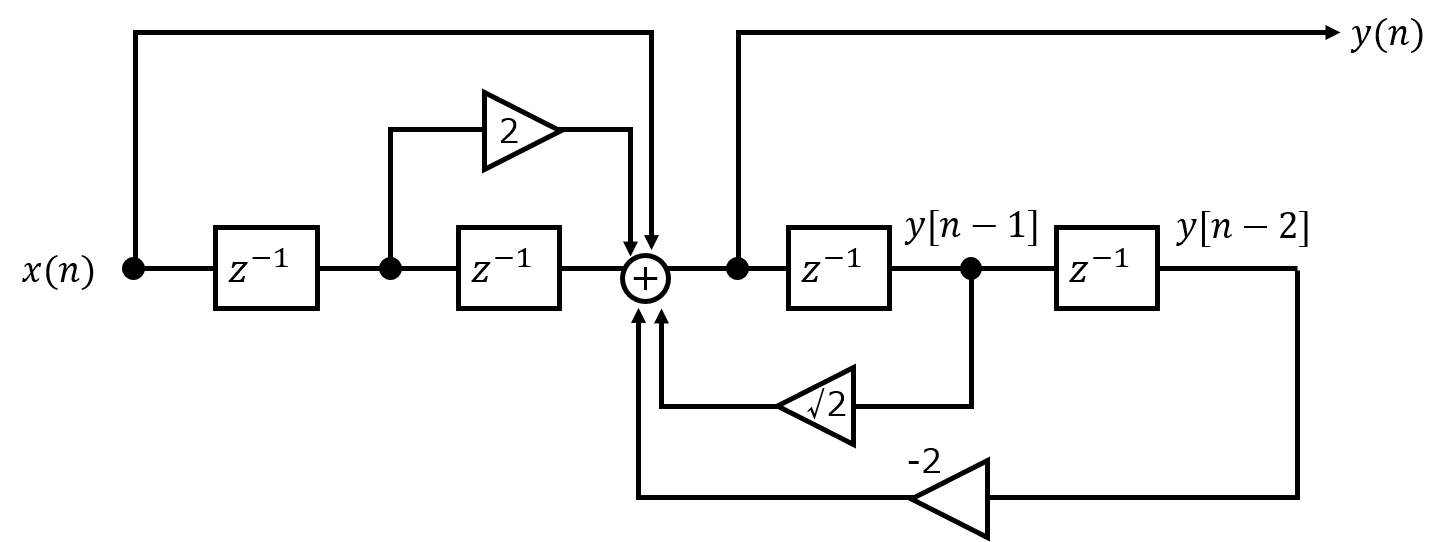
【問】以下のシステムで表される2次IIRフィルタについて、安定性を判別せよ。
はじめに
本問は、比較的オーソドックスな問題と思います。問題集で類題を見ている方も多いのではないでしょうか。
与えられた差分方程式から伝達関数を求め、その安定性を判別する問題解説はネットで扱われていました。しかし、システム図から差分方程式を作成する過程までは無かったので、今回扱うことにしました。制御工学で安定性判別をしている方々ならば、それに通ずる内容もあり、とっつきやすい内容ではないかと思います。
本問で覚えたいこと
- システム図から差分方程式[n]を立式する。
- 差分方程式をz変換し、伝達関数\(H(z)\)を求める。
- 伝達関数の極を求め、絶対値が1より大きいか確認する。
制御工学と解答パターンは似ています。
伝達関数がs平面ではなくz平面であること。差分方程式の項が[n-1]であれば\(z^{-1}\)、[n-2]ならば\(z^{-2}\)がz変換後に付くこと、安定性判別を単位円で行うことが信号処理ならではの内容です。
IIRフィルタとは
入力\(x\)にインパルス入力を与えた時、出力\(y\)の応答が無限に続くことを言います。
問題で与えられたフィルタ回路は、加算器+に対し出力yのフィードバック要素が加算されています。
このように、フィードバックループがある場合は、IIRフィルタになりやすいです。
逆に、フィードフォワードのように、入力から出力までの信号の流れが一本道=フィードバックループが無い場合は、応答が有限時間で0になります。
このような回路をFIRフィルタと言います。
解答例
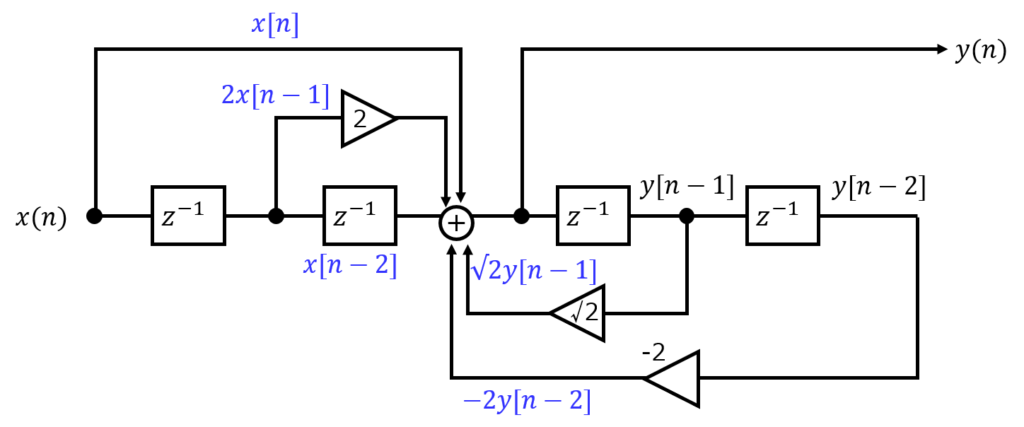
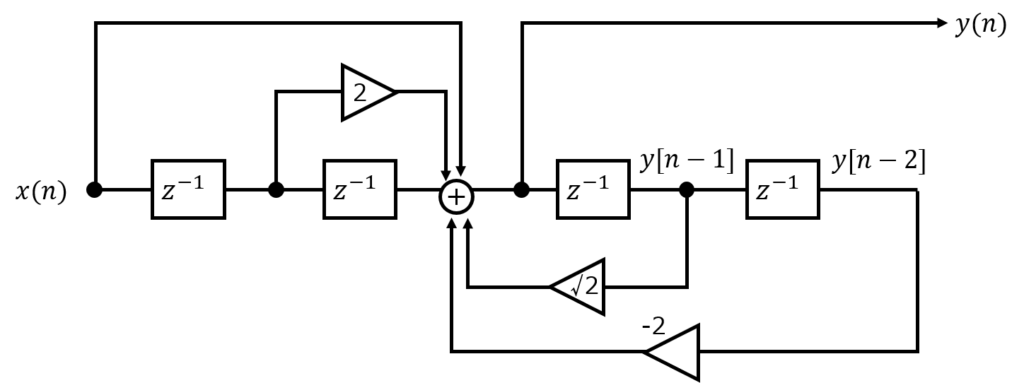
システム図を読み解き差分方程式を作成する。遅延素子\(z^{-1}\)1つにつき、信号が1ステップ分遅れるから
\begin{eqnarray}y\left( n\right) =\sqrt{2}y\left( n-1\right) -2y\left( n-2\right) +x\left( n\right) +2x\left( n-1\right) +x\left( n-2\right) \end{eqnarray}
で得られる。これをz変換し、
\begin{align}Y\left( z\right) &=\sqrt{2}Y\left( z\right) z^{-1}-2Y\left( z\right) z^{-2}+X\left( z\right) +2x\left( z\right) z^{-1}+x\left( z\right) z^{-2} \\ \left( 1-\sqrt{2}z^{-1}+2z^{2}\right) Y\left( z\right) &=\left( 1+2z^{-1}+z^{-2}\right) X\left( s\right) \\ H\left( z\right) &=\dfrac{1+2z^{-1}+z^{-2}}{1-\sqrt{2}z^{-1}+2z^{-2}} \end{align}
極=0を考える。
\(z=\dfrac{-\sqrt{2}\pm i\sqrt{6}}{2}\)になる。
極の絶対値は、\(\sqrt{\left( \dfrac{\sqrt{2}}{2}\right) ^{2}+\left( \dfrac{\sqrt{6}}{2}\right) ^{2}}=2\)
1より大きいため不安定になる。
補足
よく、z変換の章では、ROCとBIBO安定の2つの英文字用語が出てきます。
本問はBIBO安定に関して問うていますが、両者を混同するあまり正しい答えを導けない可能性があります。
最後に、両者の違いについて述べます。
ROCについて
こちらは、そもそものシステムがz変換可能な条件を示しています。
無限級数、\(a_0z^{0}+a_1z^{-1}+a_2e^{-2}+・・・+a_kz^{-k}+・・・)\)のz変換が成立するとき。公比にあたる\(a_kz^{-k}\)が1より小さくないと、計算収束しません。(1より大きいと発散)
こちらの条件を言い換えると、\(z>a_k\)になり、複素数平面に半径\(a_k\)の円をプロットしたときの外部領域にあたります。
※上記の説明は、信号が因果的である前提です。(右側z変換)
※n<0に対し、0以外の信号がある場合は、左側z変換になり、収束領域が逆になります。
BIBO安定について
こちらは、z変換したシステムが安定である条件を示しています。
ROC領域内で円積分路Cを取り、留数定理を使用し、逆z変換を考えます。
逆z変換後の信号の形は、\((a)^{n}\)の形で表すことができます。 (ただし、aは極)
極aの絶対値が1未満のとき、n→∞で0に収束しますので安定と言えます。(a>1の場合は、発散するので不安定)
結論
両者の条件を混同し、安定性について問われている問題に対して、極が1より大きいから安定としてしまってる答案があります。
是非、簡潔で良いのでそれぞれの条件の意味を考え、間違いのないように条件分けしていきたいですね。
最後に
本問が、試験問題の答案作成及びディジタル信号処理分野に対する理解の一助となれば非常に嬉しいです。
参考文献
新しい信号処理の教科書:馬場口 登(著) 中村 和晃(著) 第9章