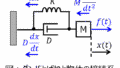
下記の図1に開ループ伝達関数\(G(s)=\dfrac{20}{s(s^{2}+4s+5)}\)を用いた制御系を示す。
また、図2に位相進み要素\(C(s)=\dfrac{1+scT}{1+sT}\)を適用した制御系を示す。ただし、\(K>0,c>1,T>0\)とする。下記の問いに答えよ。
(1)\(G(s)\)のゲイン交差周波数\(\omega_{m}\)とその時の位相余裕\(PM\)を求めよ。
(2)図2の制御系で、(1)で求めた\(\omega_{m}\)を維持したまま、位相余裕を\(\dfrac{\pi}{6}\)とするような\(K,c\)を求めよ。なお、\(\omega_{m}=\dfrac{1}{T\sqrt{c}}\)の関係があるとする。

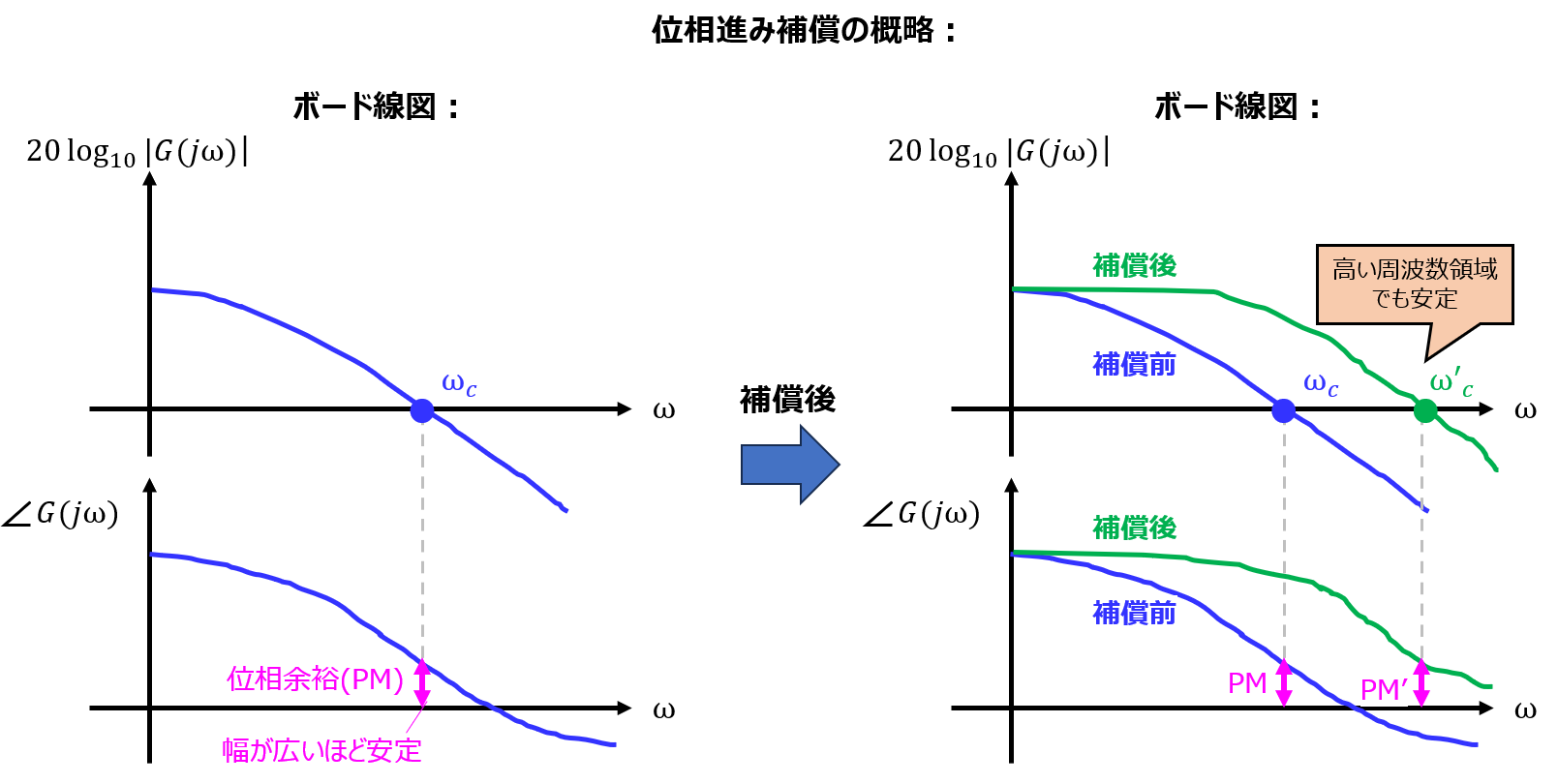
位相進み補償とは
ゲイン交差周波数付近の位相を進めて、位相余裕を増やすことを言います。
以前の記事で位相余裕の考え方について説明しました。
開ループ伝達関数\(G(j\omega)\)のゲイン[dB]が0になるときのゲイン交差周波数\(\omega_{m}\)に対する位相が、-180度から離れている程度を言います。
実際、制御設計を進めていると、与えられた伝達関数の位相余裕がイマイチである場合があります。
例えば、ある伝達関数のゲイン交差周波数に対する位相が-180度の時、位相余裕は0になります。
少しでも外乱を受けると、位相が-180度以上になりたちまち発散します。
こういった事象を防ぐため、システムにある程度の位相余裕を持たせる必要があります。
では、どうすれば良いのか?答えは、図2のように位相進み要素をシステムに組み込めば良いです。
システムの位相余裕が大きくなり、安定性が改善します。
解答例
(1)ゲイン交差周波数とその時の位相余裕
ゲイン交差周波数
伝達関数\(G(s)\)を周波数領域\(G(j\omega)\)に落とす。
\(|G(j\omega)|=1\)のとき、ゲイン\(20\log|G(j\omega)|=0\)となり、これを与える\(omega\)がゲイン交差周波数\(\omega_{m}\)である。
\begin{aligned}G(j\omega)&=\dfrac{20}{j\omega(-\omega^{2}+4j\omega+5)} \\ &=\dfrac{20}{-4\omega^{2}+j\omega(5-\omega^{2})} \end{aligned}
\begin{aligned}|G(j\omega)|=\dfrac{20}{\sqrt{16\omega^{4}+\omega^{2}(5-\omega^{2})}}=1\end{aligned}
\begin{aligned}20=\sqrt{16\omega^{4}+\omega^{2}(5-\omega^{2})}\end{aligned}
これを解くと、求めるゲイン交差周波数は、\(\omega_{m}=\sqrt{5}\)
位相余裕
\(\omega_{m}=\sqrt{5}\)を\(G(j\omega)\)に代入すると、(1)式より
\begin{aligned}G(j\omega_{m})=-1\end{aligned}
よって、この時の位相は、\(\angle G(j\omega_{m})=-\pi \)
求める位相余裕は、\(PM=\pi+\angle G(j\omega_{m})=0\)
以上より、システムとして安定限界であることが分かった。
(2)位相進み補償
図2の伝達関数全体の位相特性を考える。図1に対し、\(C(j\omega)\)が追加されたので
\begin{aligned}\angle G(j\omega_{m})C(j \omega_{m})&=\pi+\angle G(j\omega_{m})+\angle C(j\omega_{m}) \\ &=\angle C(j\omega_{m}) \\ &=\tan^{-1}(\omega_{m} c T)- \tan^{-1}(\omega_{m} T) \end{aligned}
\(\omega_{m}=\dfrac{1}{T\sqrt{c}}\)なので、
\begin{aligned} (5)&=\tan^{-1}(\sqrt{c})-\tan^{-1}\left(\dfrac{1}{\sqrt{c}}\right)\end{aligned}
三角関数の公式
\begin{aligned}\tan(a+b)=\dfrac{\tan(a)-\tan(b)}{1+\tan(a)\tan(b)}\end{aligned}を用いて
\begin{aligned}(6) &= \tan^{-1}\left(\dfrac{\sqrt{c}-\frac{1}{\sqrt{c}}}{1+\sqrt{c}\frac{1}{\sqrt{c}}}\right) \\ &= \tan^{-1}\left(\dfrac{c-1}{2\sqrt{c}}\right) \end{aligned}
これが位相余裕\(\frac{\pi}{6}\)になれば良いので
\begin{gather}\tan^{-1}\left(\dfrac{c-1}{2\sqrt{c}}\right)=\dfrac{\pi}{6} \\ \dfrac{c-1}{2\sqrt{c}} = \dfrac{1}{\sqrt{3}} \\ c=3 \end{gather}
\(\omega_{m}=\sqrt{5}\)のとき、ゲインが0[dB]になれば良いので
\begin{aligned}20\log |K|+20\log|G(j\omega_{m})|+20\log|C(j \omega_{m})|=0\end{aligned}
(1)より、\(20\log|G(j\omega_{m})|=0\)
\begin{aligned}|C(j \omega_{m})| &= \sqrt{\dfrac{1+\omega_{m}^{2}c^{2}T^{2}}{1+\omega^{2}T^{2}}} \\ &=\sqrt{\dfrac{1+c}{1+\frac{1}{c}}} \\ &=\sqrt{3}\end{aligned}
だから、\(K\)は(13)式を相殺するように設定すればよく
\begin{aligned}K=\dfrac{1}{\sqrt{3}}\end{aligned}
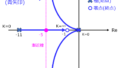
補足:位相進み補償後の根軌跡について
(2)より、位相進み要素をシステムに組み込むことで、位相余裕を確保することができました。
と言うことは、伝達関数の極の実部は正から遠のいていることが考えられます。実際、根軌跡としてどのように変化しているのか、確認しましょう。
伝達関数\(H(s)=\dfrac{K}{s(s+a)}\)に位相進み要素\(P(s)=\dfrac{s+c}{s+b}\) \((c<b)\)を組みこんだとき、下記のようになります。
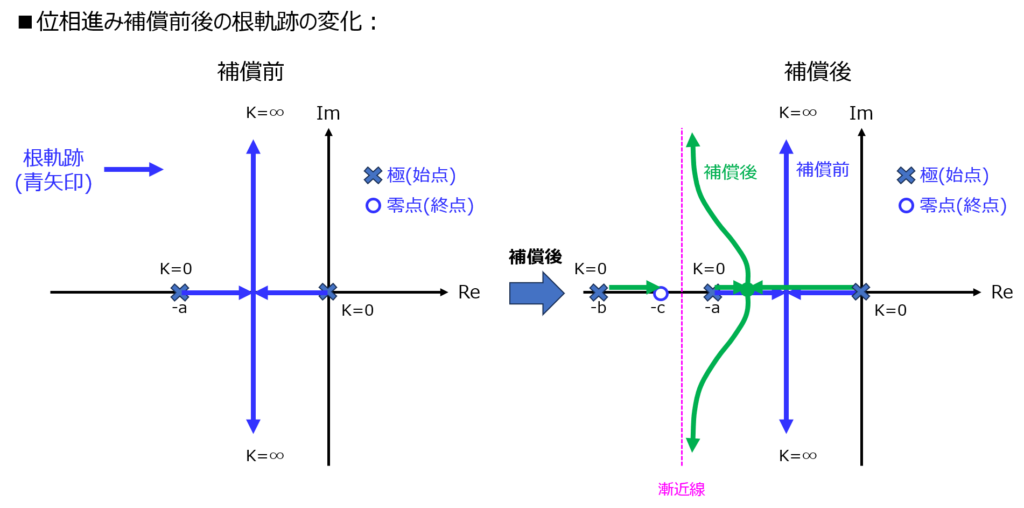
確かに、極の軌跡が正の実軸から遠ざかったことが分かりました。
※詳細な導出については、過去の記事を参照し、各自でよろしくお願いします。
最後に
位相補償に関する問題は、数々の大学の院試で出題されます。
是非、本問は解けるようになるまで繰り返してみてください。