
はじめに
本記事は、院試に向けた制御工学の基本事項のまとめ記事になります。他の科目でもまとめ記事を作成しており、同じく取り上げます。
制御工学は、古典制御のみを出題範囲とする大学が大多数を占めます。現代制御まで試験範囲に入っている大学は今や九大、広島大くらいです。本記事でも、古典制御の基本事項を中心に紹介していきます。
なお、ラプラス変換については数学の基本事項にあたりますのでここでは割愛します。下記の記事で特集していますので、よろしければどうぞ。
古典制御
一入力一出力の制御構造を持つ系です。
古典制御だけでも十分な広さの試験範囲を持っています。順に紹介していきます。
伝達関数
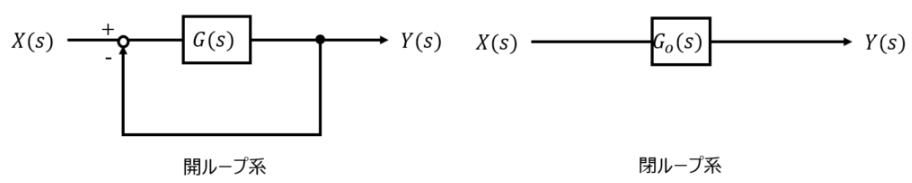
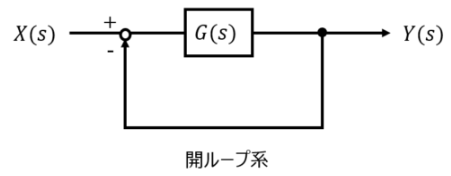
入力$X(s)$に対し出力$Y(s)$の関係を表す関数です。試験によっては、入力は$R(s)$で表されることもあります。与えられた変数に基づき解いていきましょう。
出力$Y(s)$が入力$X(s)$に対しフィードバック要素を持っている場合、$G(s)$を開ループ伝達関数、持っていない場合、$G_{o}(s)$を閉ループ伝達関数と言います。
試験本番にて、緊張のためか対応関係を間違った方を見たことがあります。ここで確認しておきましょう。
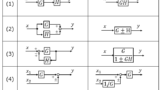
伝達関数の簡単化
よく、試験の最初の問題で与えられたブロック線図を簡単化し、伝達関数を求める問題が出題されます。下記の表に基づいてブロック線図を動かし、簡単化していくことができます。
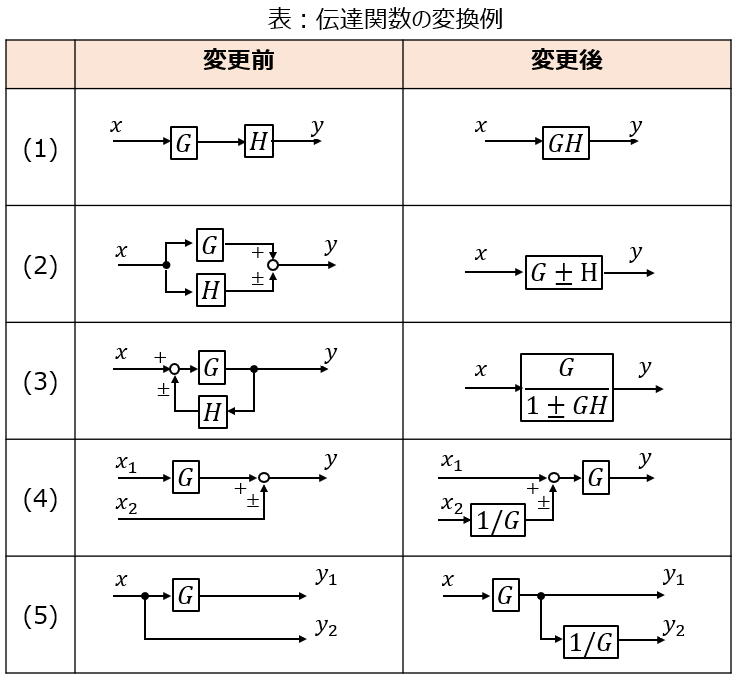
筆者としては、上記の表をわざわざ覚えていなくとも、信号の入出力関係を数学的に立式し解く方法を勧めています。下記の記事で紹介しています。
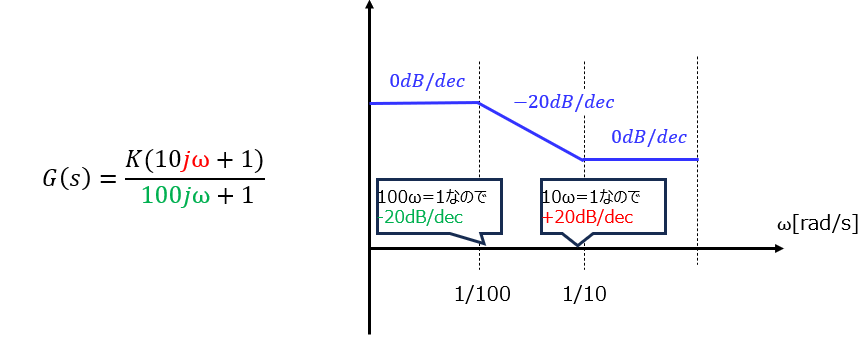
ボード線図
与えられた伝達関数のゲインの概形を知るためにプロットするグラフです。
伝達関数の分母分子に注目し、括弧内を\(1+As\)形にして、周波数領域\(1+Aj\omega \)に変換します。
ωを大きくしていき、\(A\omega=1\)になったとき、分子ならば\(+20dB/dec\)、分母ならば\(-20dB/dec\)傾きを変化させます。
下記に例を示します。
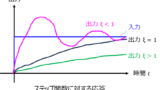
2次遅れ要素
伝達関数の分母$s$の次数が2である関数を言います。
$\xi$を減衰率。$\omega_n$を固有周波数とすると、下記の形で示されます。
\begin{eqnarray}G\left( s\right) =\dfrac{\omega _{n}^{2}}{s^{2}+2\xi \omega_{n}s+\omega _{n}^{2}}\end{eqnarray}
出力に対する入力の比→減衰率、出力信号の周波数→固有周波数 で表されます。与えられた入力の信号波形に対し出力信号波形の関係を見る時に2つのパラメータに注目して解きます。
例えば、入力信号に対し出力信号の振幅が2倍ならば、$\xi$は1/2で、逆数の関係になります。固有周波数は、出力信号の周波数に対応します。
与えた入力信号に対し、出力信号の波形から伝達関数を推測する問題がよく出てきます。周波数伝達関数の位相遅れの条件も合わせて解くことができます。
ラウス・フルビッツの安定判別法
システムが安定とは、時間を十分に長くとった時、入力に対しての出力が発散しないことを言います。伝達関数の極で見ると、全て負の値を取る必要があります。ラプラス逆変換をした時に$\exp(-at)$型になり、$t→\infty$を考えた時に0に収束⇒安定になるからです。
もし、正の極が存在する場合は、$\exp(at)$項が存在することとなり、$t→\infty$を考えた時に発散します。このため、不安定となります。
一方で、伝達関数の分母が$s$の3次方程式となると、手計算で極を求めることは難しくなります。具体的な極の値は分からずとも、システムの安定/不安定を判断するために下記の判別方法があります。
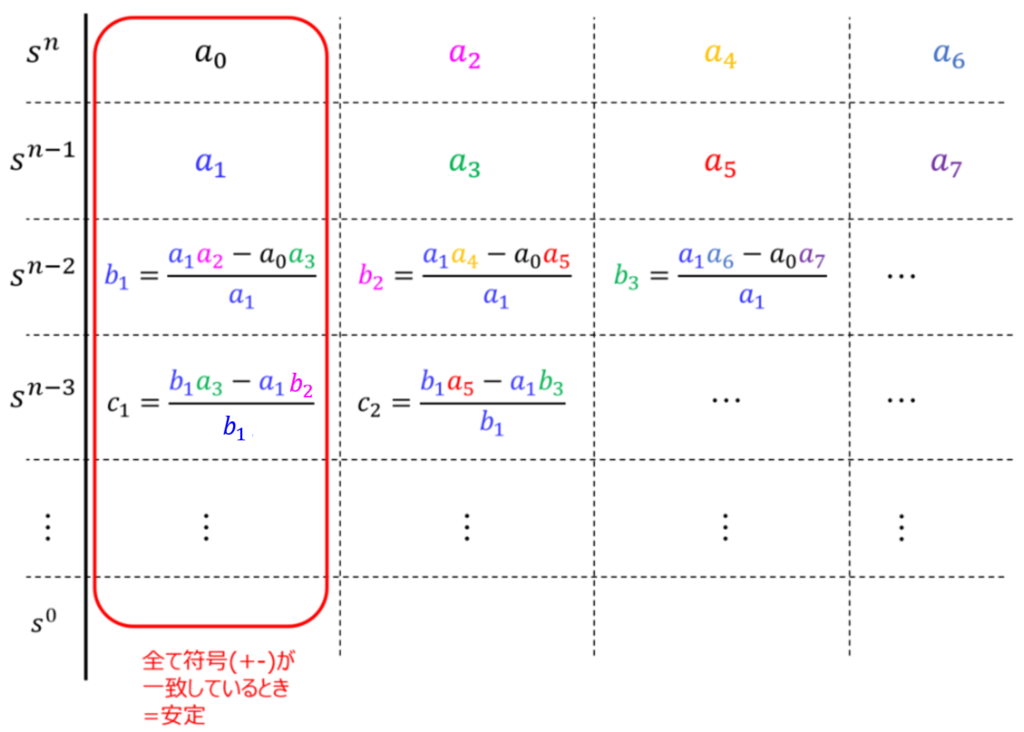
ラウスの安定判別法
特性方程式 \(1+G(s)=0\)が、
\begin{eqnarray}a_{0} s^{n}+a_{1} s^{n-1}+a_{2} s^{n-2}+ \cdots + a_{n-1} s^{1}+a_{n}=0\end{eqnarray}で表されるとき、下記の配列を計算し、一番左の列が全て同じ符号ならば安定になります。
フルビッツの安定判別法
下記の条件で判断できます。
- 係数\(a_{0},a_{1},a_{2},\cdots,a_{n-1},a_{n}\)が全て正
- 以下の行列式が全て正であること
\begin{vmatrix} a_{1}a_{3} \\ a_{0}a_{2} \end{vmatrix}
\begin{vmatrix} a_{1} & a_{3} & a_{5} \\ a_{0} & a_{2} & a_{4} \\ 0 & a_{1} & a_{s} \end{vmatrix}
・・・
\begin{vmatrix} a_{1} & a_{3} & a_{5} & \ldots & a_{2n-3} \\ a_{0} & a_{2} & a_{4} & \ldots & a_{2n-4} \\ 0 & a_{1} & a_{3} & \ldots & a_{2n-5} \\ 0 & a_{0} & a_{2} & \ldots & a_{2n-6} \\ 0 & 0 & a_{1} & \ldots & a_{2n-7} \\ \vdots & \vdots \\ 0 & 0 & 0 & \ldots & a_{n-1} \end{vmatrix}
フルビッツの安定判別法を用いることで、不安定極の数は分かりませんが、システムの安定性/不安定性どちらに属するのかについては分かります。問いの内容次第で使用する判別法を変えていきましょう。
ナイキストの安定判別法
前章のように、特性方程式から安定性が分かりますが、ナイキスト線図を作図することでも安定性を判別できます。
伝達関数を$s→j \omega$に周波数変換し、ベクトル線図を作図すると、(-1,j0)から見て右に軌跡があると安定、左にあると不安定で判別できます。
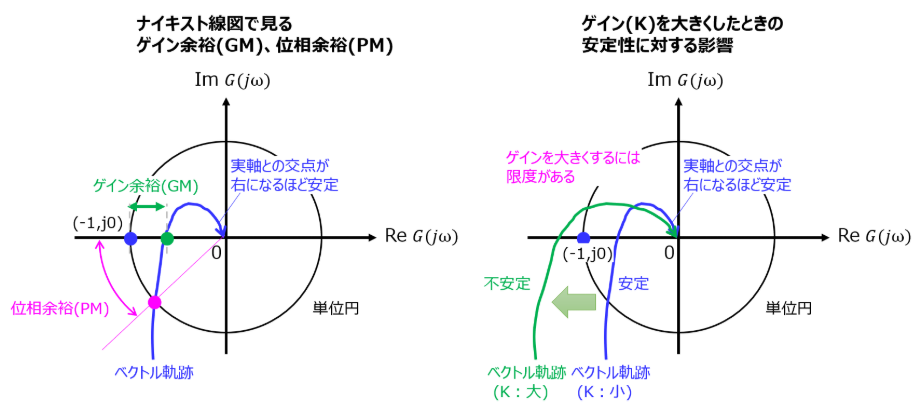
なお、ゲイン余裕、位相余裕についてもナイキスト線図から判断できます。
実軸と交差する点と(-1,j0)の差がゲイン余裕、単位円と交差する点と(-1,j0)の位相差が位相余裕に対応します。
定常偏差
ある制御系に入力を与え、定常状態になったとき、入力$X(s)$に対する出力$Y(s)$の差分$E(s)$の値を言います。
$E(s)=X(s)-Y(s)$により、$E(s)$を求め、最終値の定理により定常偏差$e(\infty$)$を求めることができます。
\begin{eqnarray}E(s)=\dfrac{1}{1+G(s)}X(s)\end{eqnarray}
\begin{eqnarray}e(\infty)=\lim _{s\rightarrow 0}sE\left( s\right) =\lim _{s\rightarrow 0}s\dfrac{1}{1+G\left( s\right) }X(s)\end{eqnarray}
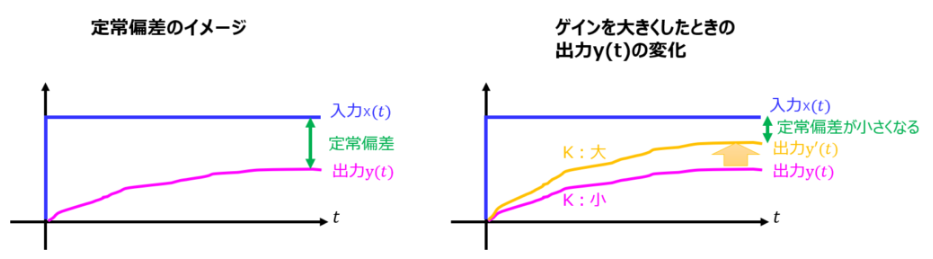
ゲイン$K$を大きくすると定常偏差を小さくできますが、代わりに安定性が悪化する課題もあります。論述問題として問われることもありますので、一緒に把握しておきましょう。
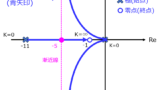
根軌跡
ゲインKを0から∞に変化させたときの閉ループ伝達関数の根(極)の軌跡を言います。
伝達関数の分母$s$の次数が2の場合は、直接二次方程式を解くことで作図することもできますが、3次である場合が良く問われますので、ここではその紹介をします。
一巡伝達関数\(G(s)H(s)\)について
- 下記1~5を組み合わせて作図する方法 (任意のsの次数に対して使用可能)
- 根軌跡の始点の数は極の個数。終点の数は零点の個数と一致する。
※始点の数に対し終点の数が足りない分は無限遠へ発散する。 - 根軌跡の分岐の数は極の数に等しい
- 根軌跡は実軸に対して上下対称である
- 無限遠に伸びる根軌跡の漸近線の傾斜角度\(\phi_{k}\)、実軸との交点を\(\sigma_{k}\)とすれば、下記式で与えられる。
- \(\phi_{k}=\dfrac{(2k+1)\pi}{極の次数-零点の次数}\)
- \(\sigma_{k}=\dfrac{極の総和-零点の総和}{極の次数-零点の次数}\)
- 実軸上のある点から右側をみて、\(G(s)H(s)\)の極と零点の数の総和が奇数ならば、その点は根軌跡上にある。
- 根軌跡の始点の数は極の個数。終点の数は零点の個数と一致する。
現代制御
状態方程式と伝達関数
\begin{cases}x=Ax+bu\\ y=Cx+du\end{cases}
のように、複数の入力ベクトルと出力ベクトルで表される方程式になります。ラプラス変換を用いて伝達関数として下記で求めることができます。
\begin{eqnarray}G\left( s\right) =\boldsymbol{C}\left( s\boldsymbol{I}-\boldsymbol{A}\right) ^{-1}\boldsymbol{b}\end{eqnarray}
可制御性
可制御性を判定する行列
\begin{bmatrix}b & Ab & A^2b & \cdots & A^{n-1}b\end{bmatrix}
について、$rank=n$の場合、可制御になります。
状態フィードバック
可制御の場合、状態フィードバックが可能になります。
状態方程式
\[
\dot{x}=Ax+Bu
\]
に対して、状態フィードバック
\[
u=-Kx
\]
を施すと、
\[
\dot{x}
=
Ax+B(-Kx)
=
(A-BK)x
\]
これが(9)式に作用することで、伝達関数の極配置を変更できます。
可観測性
可制御性行列と考え方は変わりません。
下記の可観測性行列において、$rank=n$の場合、可観測になります。
\begin{bmatrix}
C \\
CA \\
CA^2 \\
\vdots \\
CA^{n-1}
\end{bmatrix}
可観測であればオブザーバゲイン を設計して、誤差系の固有値(極)を任意に配置できます。詳しくは、下記の記事で紹介しています。
最後に
制御工学は計算量が多いため、計算ミスが多くなりがちです。どうしても得点期待値がブレてしまうため、可能であれば別の科目の選択をオススメします。
一方で、社会に出て、メーカーで機器設計をする場合はよく使います。院試に限らず、本記事が一般教養の一つになると幸いです。
